CollabJam
Tool Summary
| Metadata | |
|---|---|
| Release Yearⓘ The year a tool was first publicly released or discussed in an academic paper. | 2025 |
| Platformⓘ The OS or software framework needed to run the tool. | Electron |
| Availabilityⓘ If the tool can be obtained by the public. | Available |
| Licenseⓘ Tye type of license applied to the tool. | Open Source (MIT, CC-BY-4.0) |
| Venueⓘ The venue(s) for publications. | ACM CHI |
| Intended Use Caseⓘ The primary purposes for which the tool was developed. | Real-time Collaboration, Prototyping |
| Hardware Information | |
|---|---|
| Categoryⓘ The general types of haptic output devices controlled by the tool. | Vibrotactile |
| Abstractionⓘ How broad the type of hardware support is for a tool.
| Bespoke |
| Device Namesⓘ The hardware supported by the tool. This may be incomplete. | CollabJam Hardware, CollabJam Harness |
| Device Templateⓘ Whether support can be easily extended to new types of devices. | No |
| Body Positionⓘ Parts of the body where stimuli are felt, if the tool explicitly shows this. | Head, Arm, Hand, Torso, Leg, Foot |
| Interaction Information | |
|---|---|
| Driving Featureⓘ If haptic content is controlled over time, by other actions, or both. | Time |
| Effect Localizationⓘ How the desired location of stimuli is mapped to the device.
| Location-aware |
| Non-Haptic Mediaⓘ Support for non-haptic media in the workspace, even if just to aid in manual synchronization. | None |
| Iterative Playbackⓘ If haptic effects can be played back from the tool to aid in the design process. | Yes |
| Design Approachesⓘ Broadly, the methods available to create a desired effect.
| Direct, Library |
| UI Metaphorsⓘ Common UI metaphors that define how a user interacts with a tool.
| Track, Demonstration |
| Storageⓘ How data is stored for import/export or internally to the software. | Internal |
| Connectivityⓘ How the tool can be extended to support new data, devices, and software. | None |
Additional Information
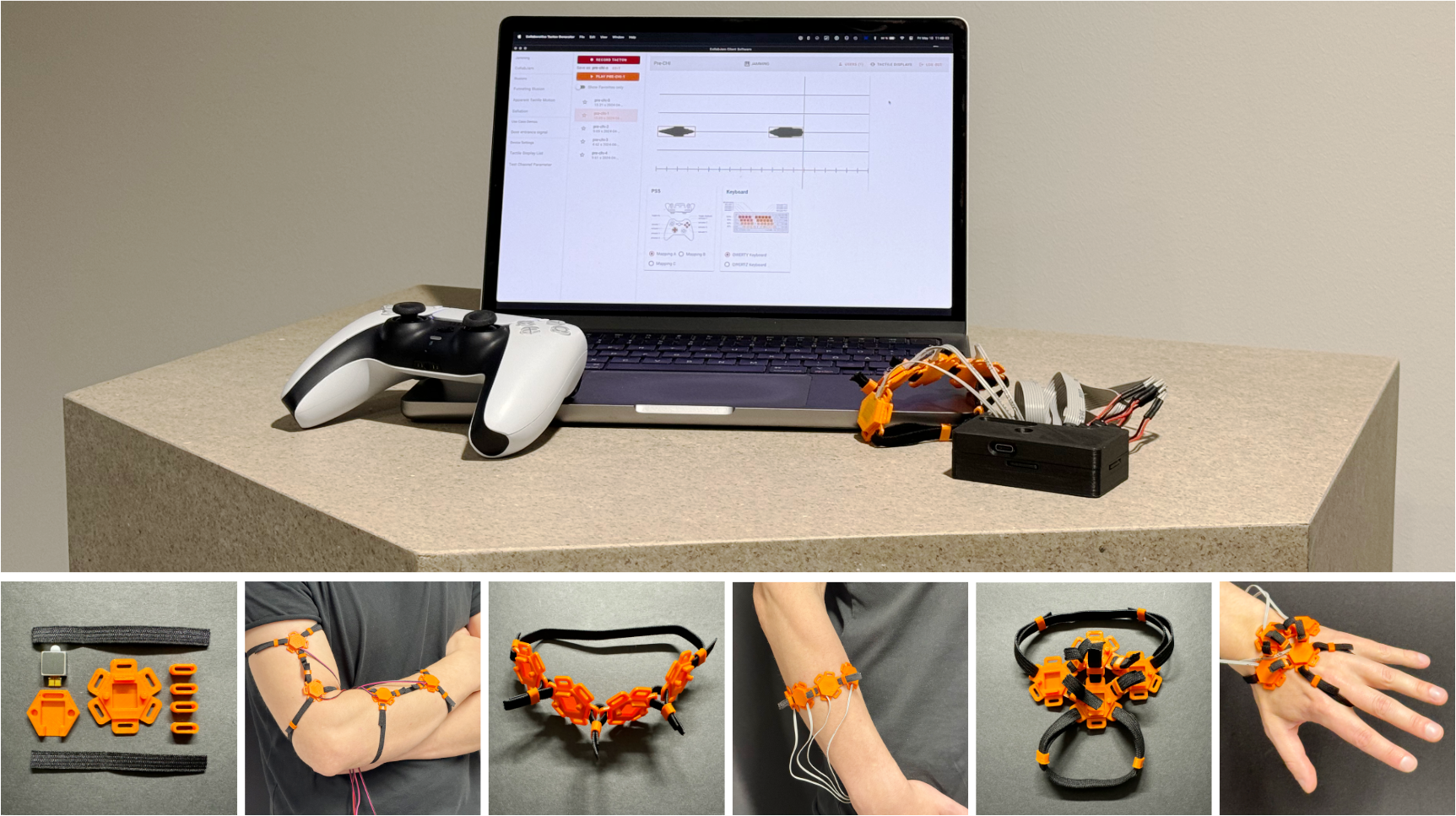
CollabJam is an open-source collaborative prototyping suite, designed to support the synchronous design of on-body vibrotactile experiences in remote or co-located scenarios. Its primary purpose is to facilitate communication between designers by enabling them to express haptic intentions through shared tactile controls.
Technically, CollabJam consists of a cross-platform desktop client application that communicates via a central server. This software connects wirelessly through Bluetooth Low Energy (BLE) to custom tactile displays capable of driving four independent actuators (compatible with ERMs, LRAs, or VCAs). These actuators can be freely attached to the skin using a modular harness. To control the actuation, users utilize gamepads for fine-grained intensity modulation or keyboards for standard actuation. Users connect within virtual rooms to share real-time control over actuators, effectively “jamming” together to test ideas before recording and refining them.
For more information about CollabJam, consult the CHI’25 paper and the main GitHub repository.