HAMLAT
Tool Summary
| Metadata | |
|---|---|
| Release Yearⓘ The year a tool was first publicly released or discussed in an academic paper. | 2008 |
| Platformⓘ The OS or software framework needed to run the tool. | Blender |
| Availabilityⓘ If the tool can be obtained by the public. | Unavailable |
| Licenseⓘ Tye type of license applied to the tool. | Unknown |
| Venueⓘ The venue(s) for publications. | EuroHaptics |
| Intended Use Caseⓘ The primary purposes for which the tool was developed. | Haptic Augmentation |
| Hardware Information | |
|---|---|
| Categoryⓘ The general types of haptic output devices controlled by the tool. | Force Feedback |
| Abstractionⓘ How broad the type of hardware support is for a tool.
| Consumer |
| Device Namesⓘ The hardware supported by the tool. This may be incomplete. | Phantom |
| Device Templateⓘ Whether support can be easily extended to new types of devices. | No |
| Body Positionⓘ Parts of the body where stimuli are felt, if the tool explicitly shows this. | N/A |
| Interaction Information | |
|---|---|
| Driving Featureⓘ If haptic content is controlled over time, by other actions, or both. | Action |
| Effect Localizationⓘ How the desired location of stimuli is mapped to the device.
| Target-centric |
| Non-Haptic Mediaⓘ Support for non-haptic media in the workspace, even if just to aid in manual synchronization. | Visual |
| Iterative Playbackⓘ If haptic effects can be played back from the tool to aid in the design process. | Yes |
| Design Approachesⓘ Broadly, the methods available to create a desired effect.
| Direct |
| UI Metaphorsⓘ Common UI metaphors that define how a user interacts with a tool.
| None |
| Storageⓘ How data is stored for import/export or internally to the software. | HAML |
| Connectivityⓘ How the tool can be extended to support new data, devices, and software. | None |
Additional Information
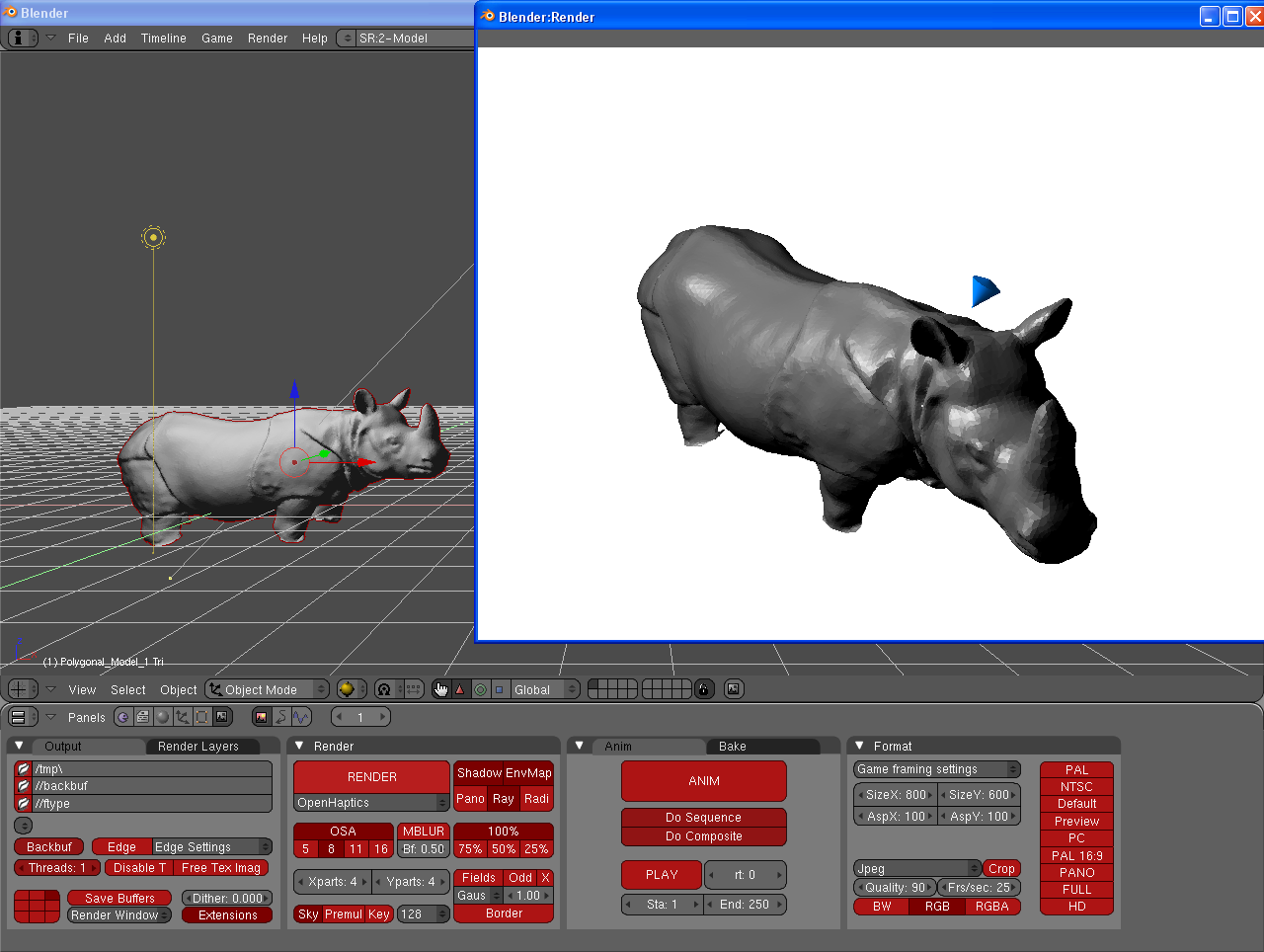
HAMLAT is an extension to Blender that adds additional menu items to control the static physical properties of modeled objects. These properties can be felt using a force feedback device in the environment itself. These properties can be imported to and exported from HAMLAT using the Haptic Applications Meta Language (HAML).
For more information, consult the EuroHaptics 2008 paper.