Synth-A-Modeler Designer
Tool Summary
| Metadata | |
|---|---|
| Release Yearⓘ The year a tool was first publicly released or discussed in an academic paper. | 2012 |
| Platformⓘ The OS or software framework needed to run the tool. | Windows, macOS, Linux |
| Availabilityⓘ If the tool can be obtained by the public. | Available |
| Licenseⓘ Tye type of license applied to the tool. | Open Source (GPL 2) |
| Venueⓘ The venue(s) for publications. | Linux Audio ConferenceEuroHaptics |
| Intended Use Caseⓘ The primary purposes for which the tool was developed. | Simulation, Music |
| Hardware Information | |
|---|---|
| Categoryⓘ The general types of haptic output devices controlled by the tool. | Force Feedback |
| Abstractionⓘ How broad the type of hardware support is for a tool.
| Class |
| Device Namesⓘ The hardware supported by the tool. This may be incomplete. | Novint Falcon, FireFader |
| Device Templateⓘ Whether support can be easily extended to new types of devices. | No |
| Body Positionⓘ Parts of the body where stimuli are felt, if the tool explicitly shows this. | N/A |
| Interaction Information | |
|---|---|
| Driving Featureⓘ If haptic content is controlled over time, by other actions, or both. | Action |
| Effect Localizationⓘ How the desired location of stimuli is mapped to the device.
| Device-centric |
| Non-Haptic Mediaⓘ Support for non-haptic media in the workspace, even if just to aid in manual synchronization. | Audio |
| Iterative Playbackⓘ If haptic effects can be played back from the tool to aid in the design process. | No |
| Design Approachesⓘ Broadly, the methods available to create a desired effect.
| Procedural |
| UI Metaphorsⓘ Common UI metaphors that define how a user interacts with a tool.
| Dataflow |
| Storageⓘ How data is stored for import/export or internally to the software. | Faust DSP File, SAM Model File |
| Connectivityⓘ How the tool can be extended to support new data, devices, and software. | None |
Additional Information
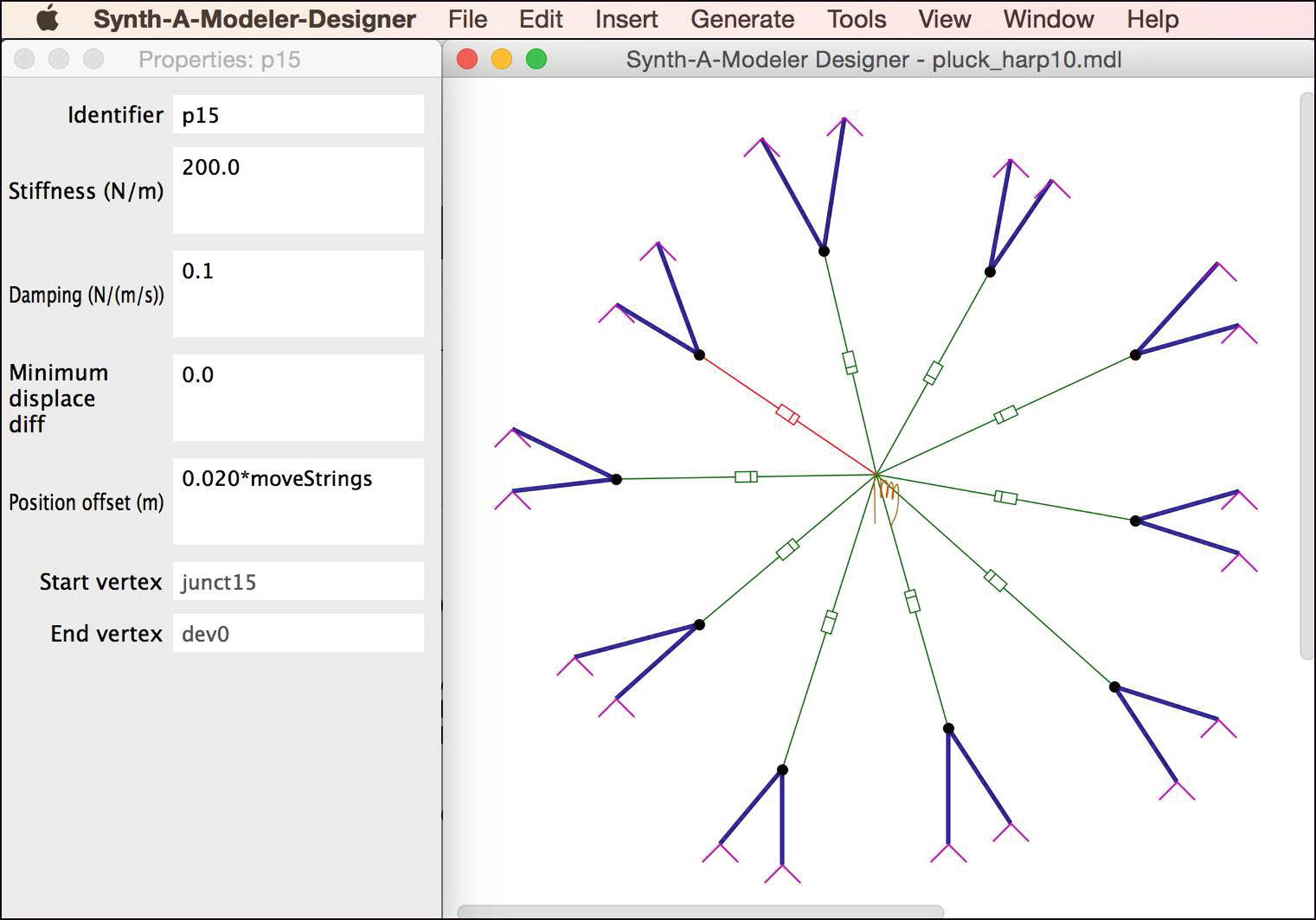
The Synth-A-Modeler Designer is designed for physical modeling for sound synthesis and can be connected to force-feedback devices as inputs. Models can be constructed using mass-interaction and waveguide modeling through graphical elements. A special “port” object provides 1 DoF of input through a supported haptic device to allow physical control over the model. When a model is complete, the Designer can export it to a Faust DSP file that can be compiled to run on various targets, such as on the Web, mobile devices, and desktop computers.
For more information, consult the 2012 Linux Audio Conference paper, the 2016 EuroHaptics paper, and the both the GitHub repository for the designer and the one for the compiler.